

1、3D-DIC技术在高速铁路轨道板承轨台测量中的应用
高速铁路的安全舒适性依赖于无砟轨道的高平顺性和稳定性。为保证轨道平顺性,在铁轨铺设之前需要测量每个承轨台的高度偏差。铁轨通过调整扣件系统可以达到设计高度并处于同一水平面上。现有技术通过接触式走行测量系统实现了对承轨台的高度偏差测量,但存在测量位点少、承轨台定位时间长、测量效率低等缺点。

中国科学技术大学张青川教授科研团队提出利用千眼狼PMLAB 3D-DIC技术与全站仪融合测量的方法,搭建载有双目视觉和反射棱镜的测量机架,测量了高铁轨道板上各个承轨台的高度偏差,本次测量方法在实际应用中,不仅减少测量误差,单日可检测效率提高10倍。实现轨道板承轨台高度偏差的高精度、高效率检测,为提高施工效率做出了贡献。(详情可见《基于数字图像相关方法的高速铁路轨道板承轨台高度偏差测量方法》)
2、实验方法
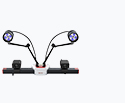
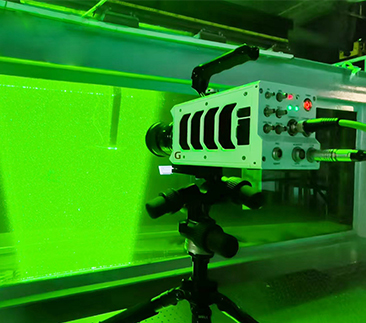
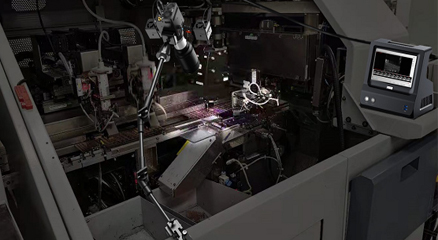
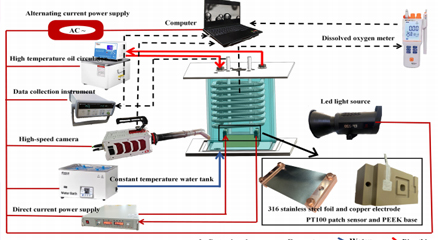
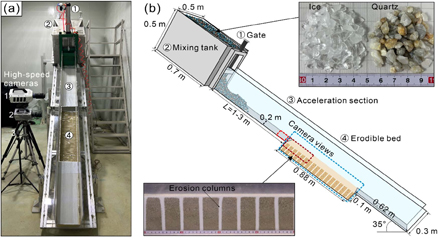
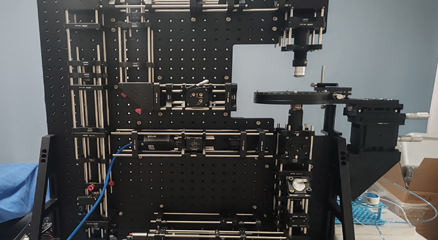
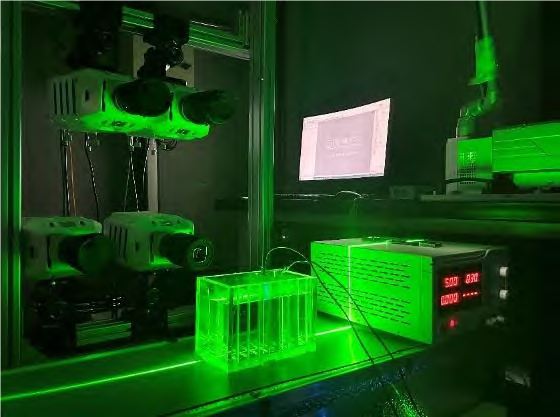
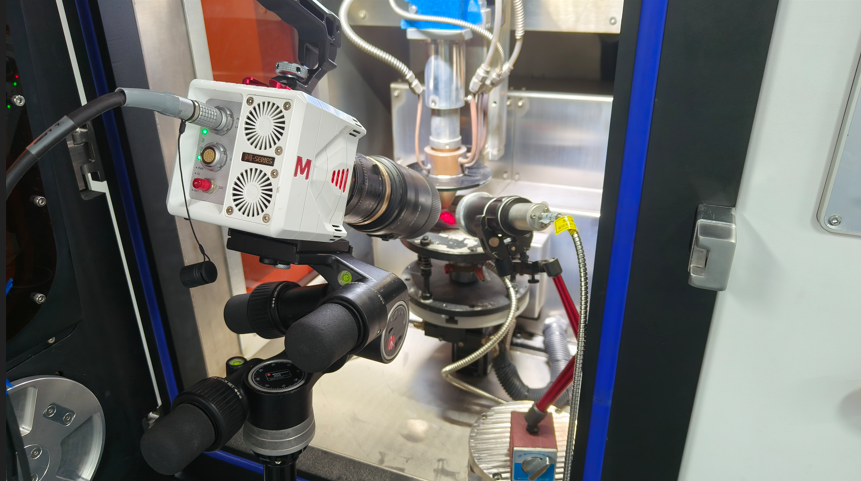
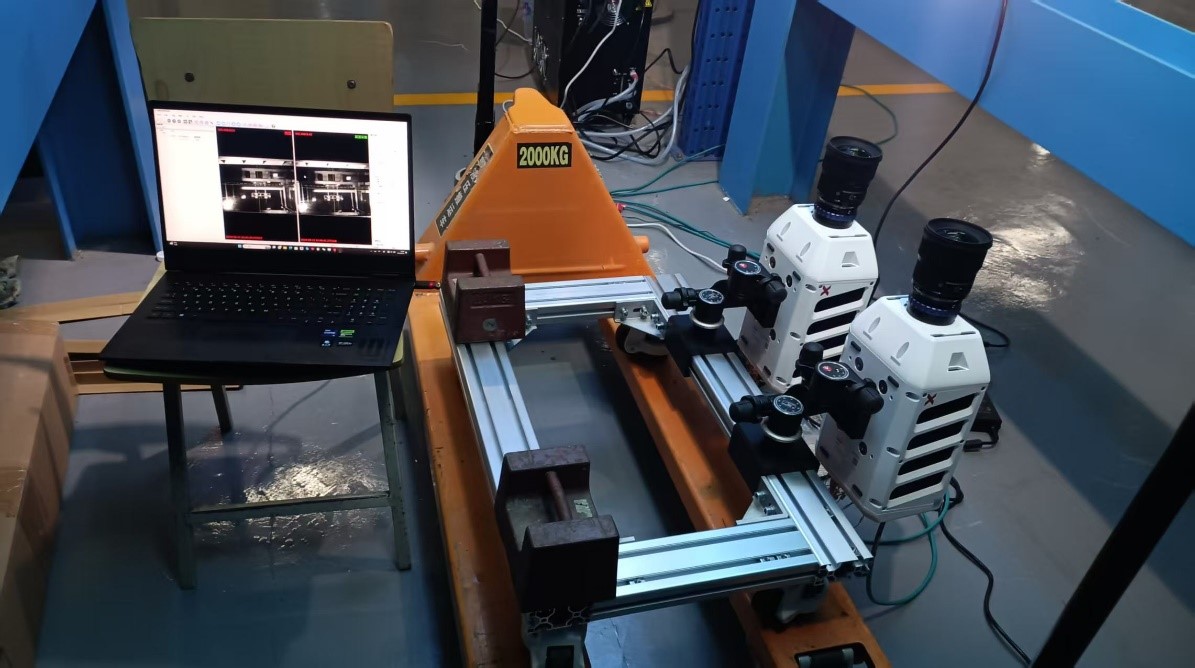
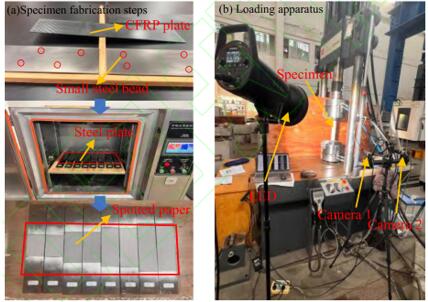
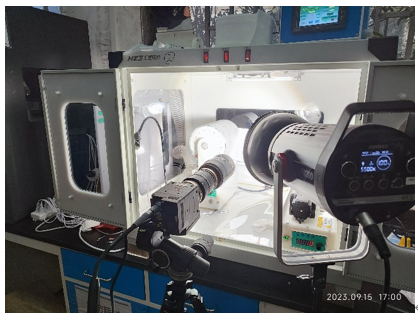
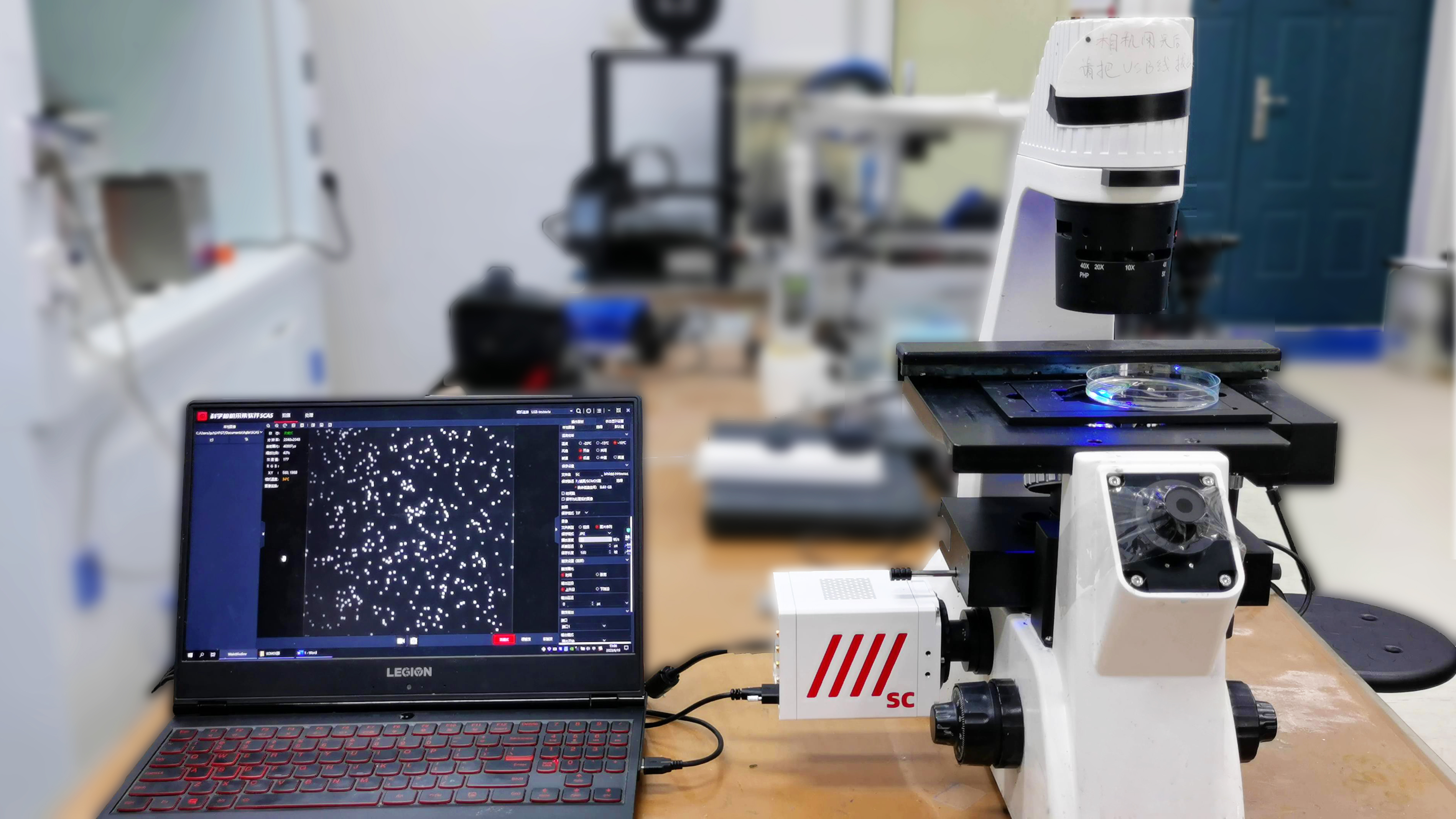
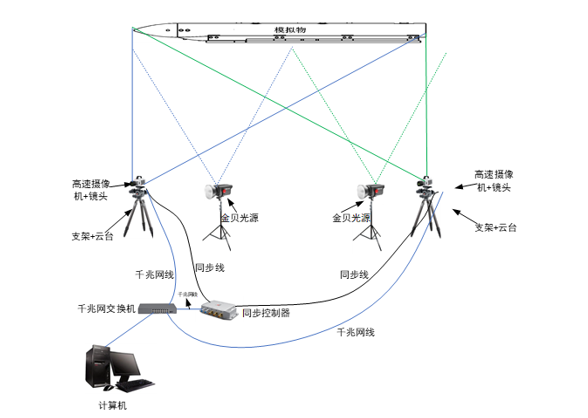
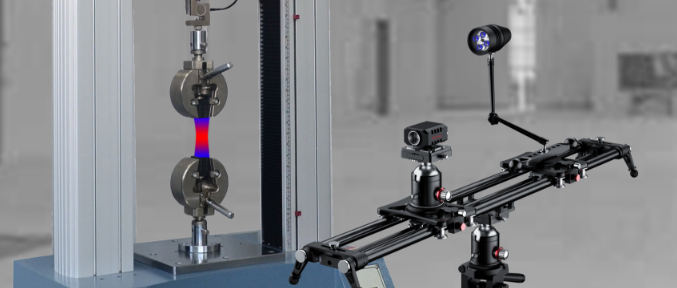
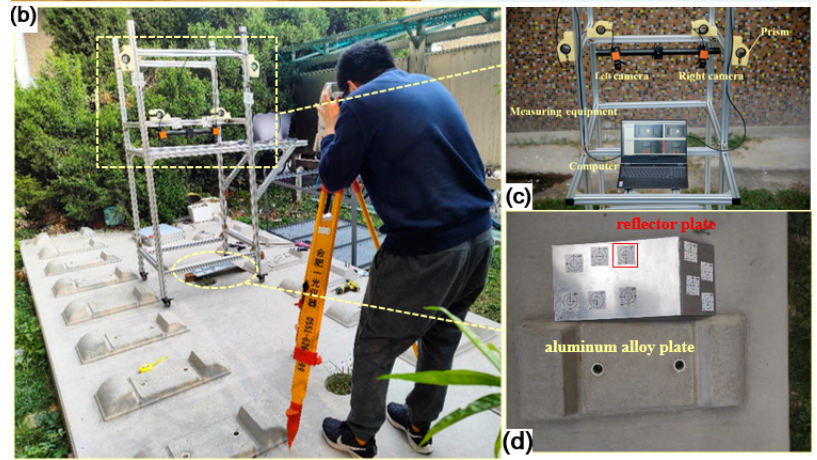
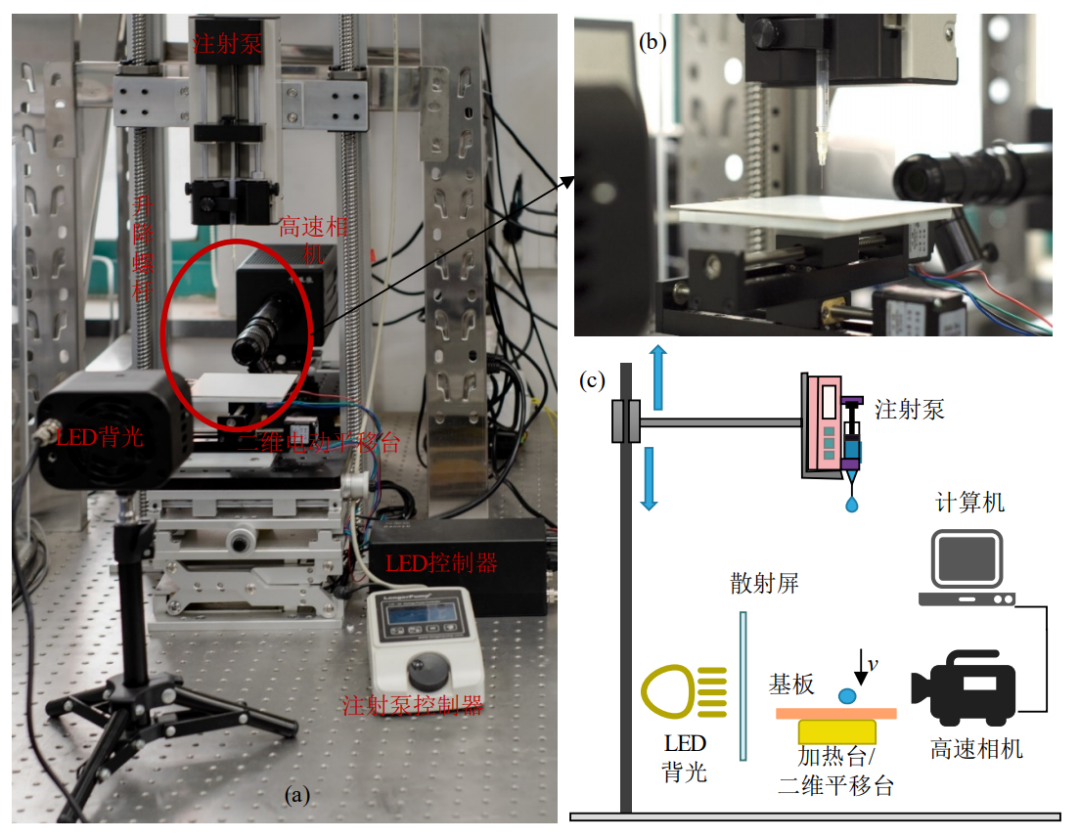
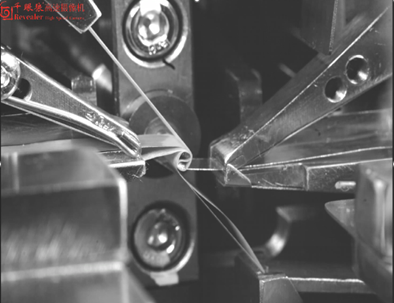
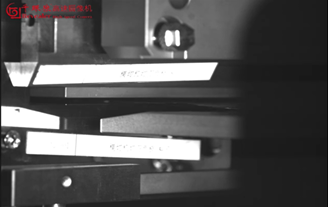
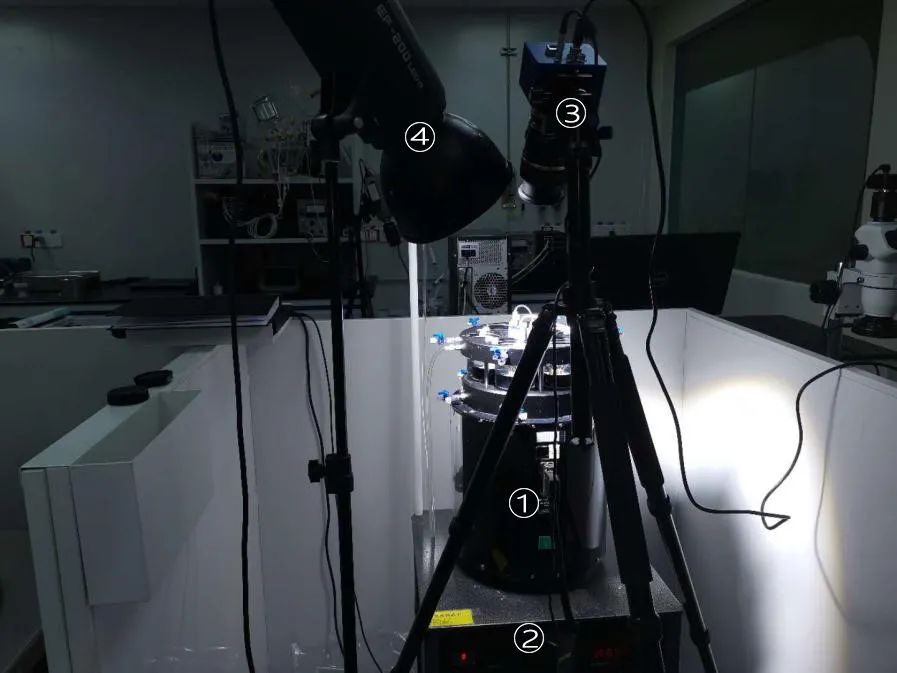
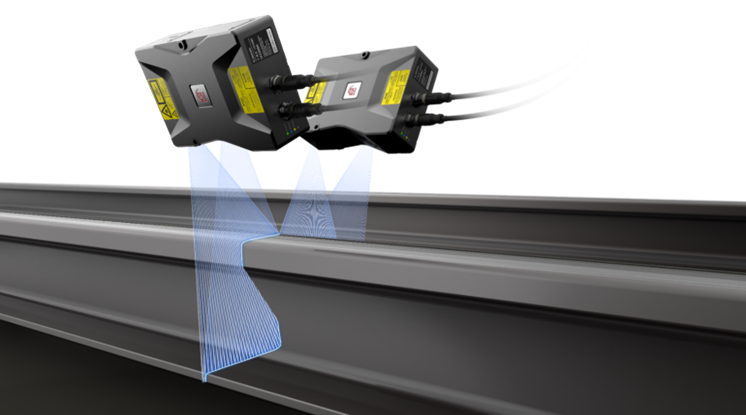
为了测量承轨台的高度偏差,科研团队重建整个轨道板上所有承轨台的三维轮廓,并提出了一种相机-全站仪-棱镜融合测量方法,可以实现大范围内承轨台高精度、高效率的三维轮廓测量。实验使用规格为40mmx40mm的铝型材组装了一个测量设备,如图1(c)所示。该测量设备由双相机系统和四个反射棱镜组成。在实验过程中,每个承轨台的三维轮廓是用双相机系统测量的,并通过全站仪对反射棱镜位置的定位来拼接。

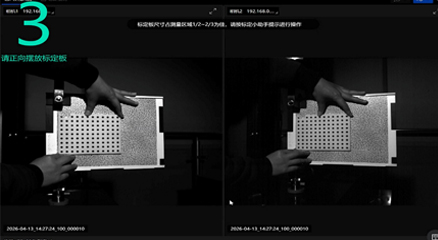
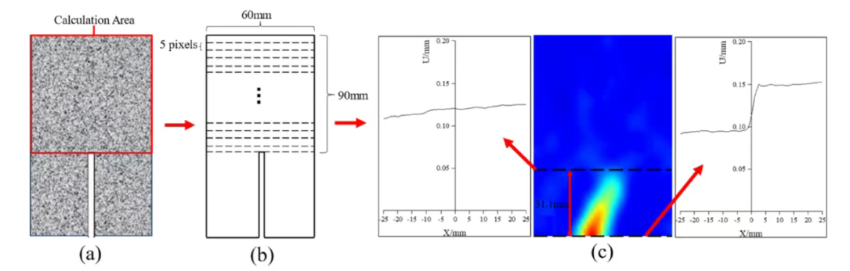
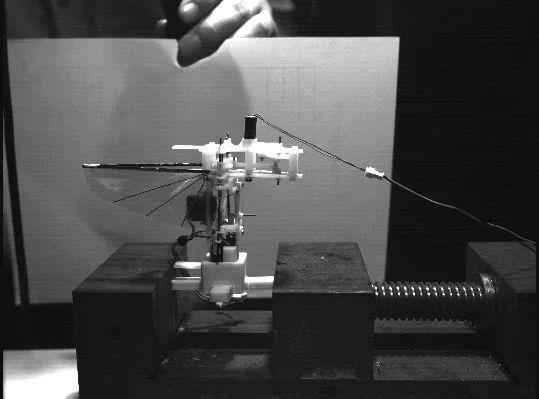
图1 (a)轨道板的真实图像;(b)标定过程;(c)测量设备;(d)贴有10块反射片的铝合金。
本次实验是基于单个轨道板进行的,分为两个过程:标定和测量。轨道板(P5600型轨道板(CRTS III))的实物图如图1(a)所示。首先标定双相机系统,以获得相机内参和外参,再标定相机-全站仪-棱镜系统。
标定结束进行实验测量。首先将测量设备移动到第一个承轨台位置处,使承轨台位于双相机视场的中心。第二,在测量设备适当距离处架好全站仪。并将测量设备移到下一个阶段的位置进行图片采集。图像采集过程中,确保相邻阶段的图片之间有重叠区域。重叠区域是使用3D-DIC方法对相邻阶段图片进行拼接的关键。
3、实验分析
1/3.基于重叠区域的点云数据拼接原理
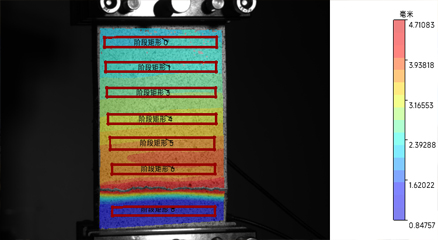
为了测量整个轨道板上所有承轨台的三维轮廓,对每个承轨台进行DIC计算和三维轮廓重建,然后拼接每个阶段的点云数据。
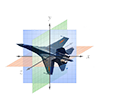
每个阶段待测物体重建后的三维坐标是在此阶段中以左相机光心中心为中心的空间坐标系下。为此科研人员在轨道板上移动双相机系统,捕捉每个阶段的图像。这个过程需要保证相邻阶段图片之间有重叠区域。不同测量阶段的三维点云数据的拼接可以通过DIC方法获得。其示意图如图2所示。

图中,点P为轨道板表面上一点,(X, Y, Z)为其在世界坐标系中的三维坐标。Pa点和Pb点分别对应该点在n-1阶段和n阶段中相机坐标系中的点,利用3D-DIC可以计算出Pa点在阶段n-1时的三维坐标(Xa, Ya, Za)。而后双相机系统沿轨道走向移动并拍摄图片,经过计算得到此时Pb点的三维坐标(Xb, Yb, Zb), 此时的相机坐标系已经发生了变化。根据Pa点和Pb点的三维坐标可以计算两个阶段相机坐标系之间的坐标转换关系。若将阶段n-1作为参考,则第n个阶段到第n-1个阶段的坐标系转换关系为RTn→n−1, 坐标系变换关系可以通过至少3个点云重叠区域中的点来求得:

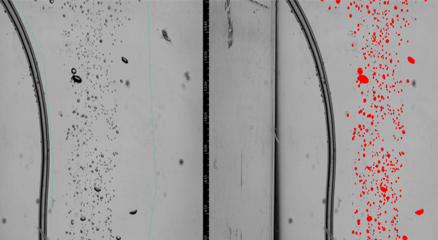
在实际实验过程中,选取k个点来计算相邻阶段相机坐标系之间的变换关系。承轨台的表面有丰富的纹理,可以作为DIC计算的散斑图案。用于点云数据拼接的点来自于承轨台表面的自然纹理,不进行特征提取。我们在相邻阶段图像的重叠区域内每隔20个像素选择一个点。在测量设备的移动过程中,相邻阶段可以人为地保证有约为相机分辨率一半大小的重叠区域。在使用3D-DIC方法进行相关匹配时,重叠区域被选为感兴趣区域,通过设置计算步长为20像素,可以选择k个共轭点。
2/3.融合测量原理
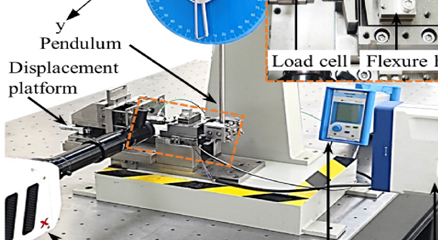
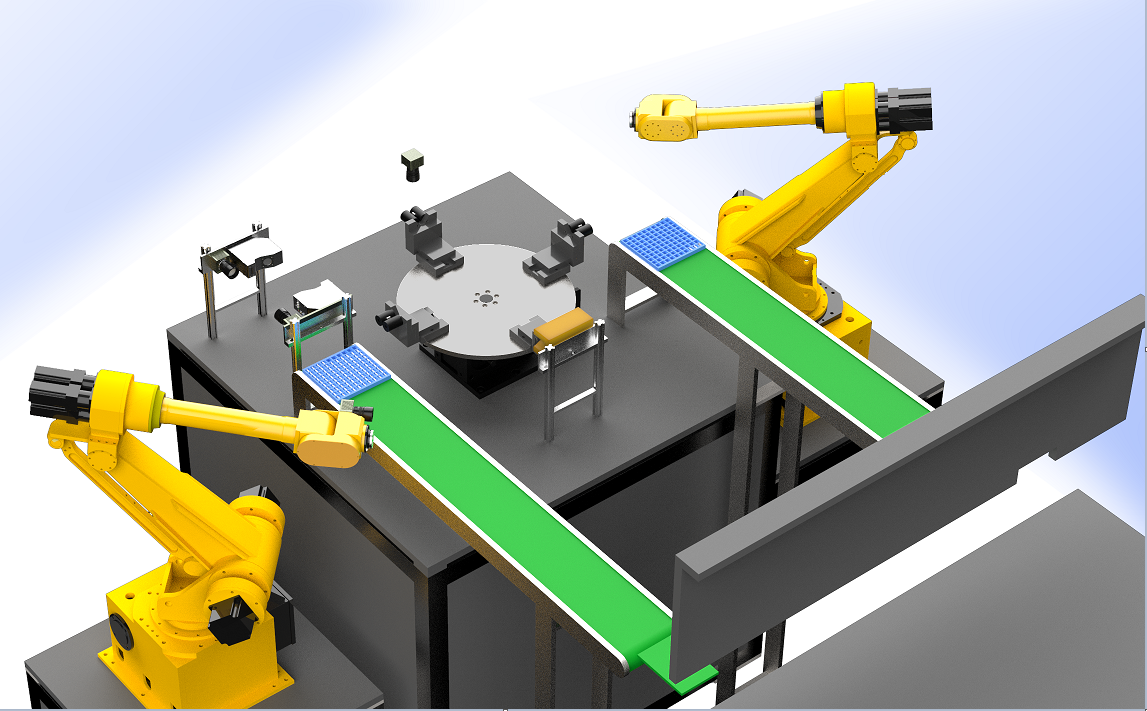
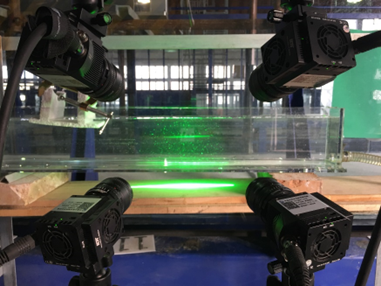
为了解决坐标系不统一和传递误差的问题,科研团队提出了一种基于反射棱镜的全站仪-相机-棱镜融合测量方法。高速铁路在建设施工前需要建立高精度、高可靠性的控制网,其中第三级为基桩控制网,为了建立相机坐标系与CPIII坐标系之间的坐标系变换关系,在测量设备上安装由4个反射棱镜组成的棱镜组。考虑使用全站仪和反射片来获得相机坐标系中棱镜中心的三维坐标。这是一个测量设备的标定过程,左右相机的立体标定也可以一起进行,称之为融合标定方法。如图3所示。

实验过程中,需要锁定相机和棱镜的位置,移动后需要重新对测量设备进行融合标定。系统标定如图4所示。

完成融合标定后,即可将测量机架移至高铁轨道上进行承轨台三维空间形貌和位置的测量。
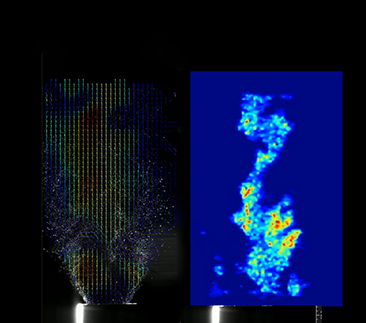
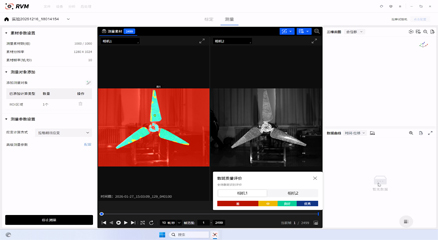
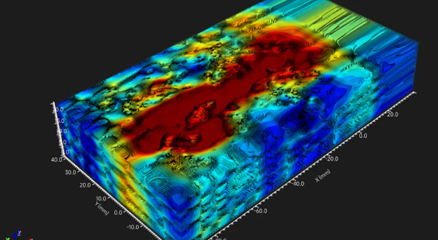
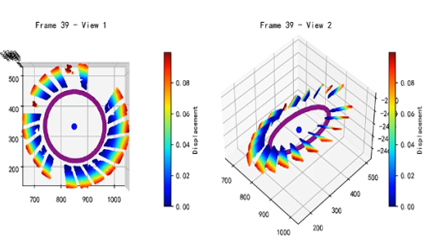
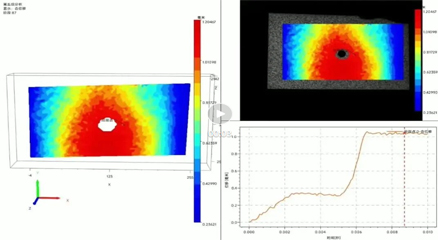
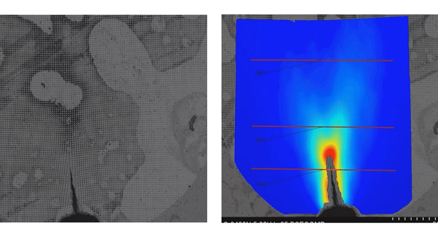
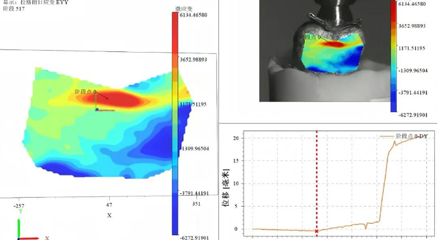
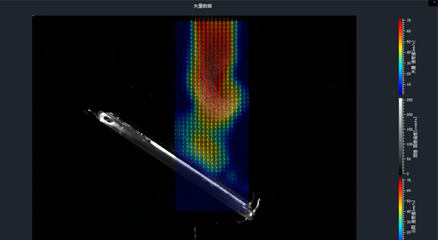
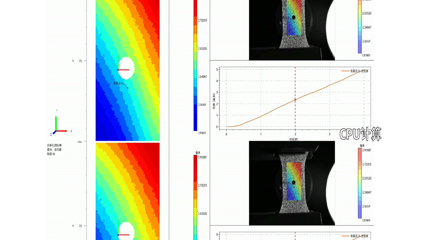
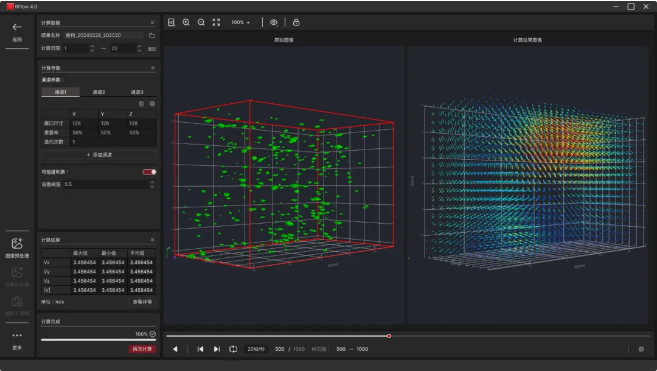
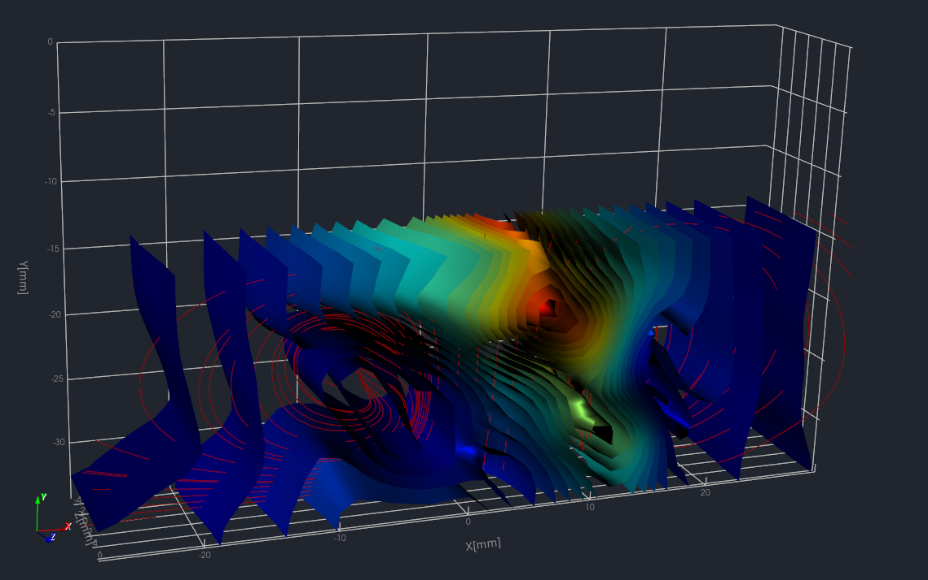
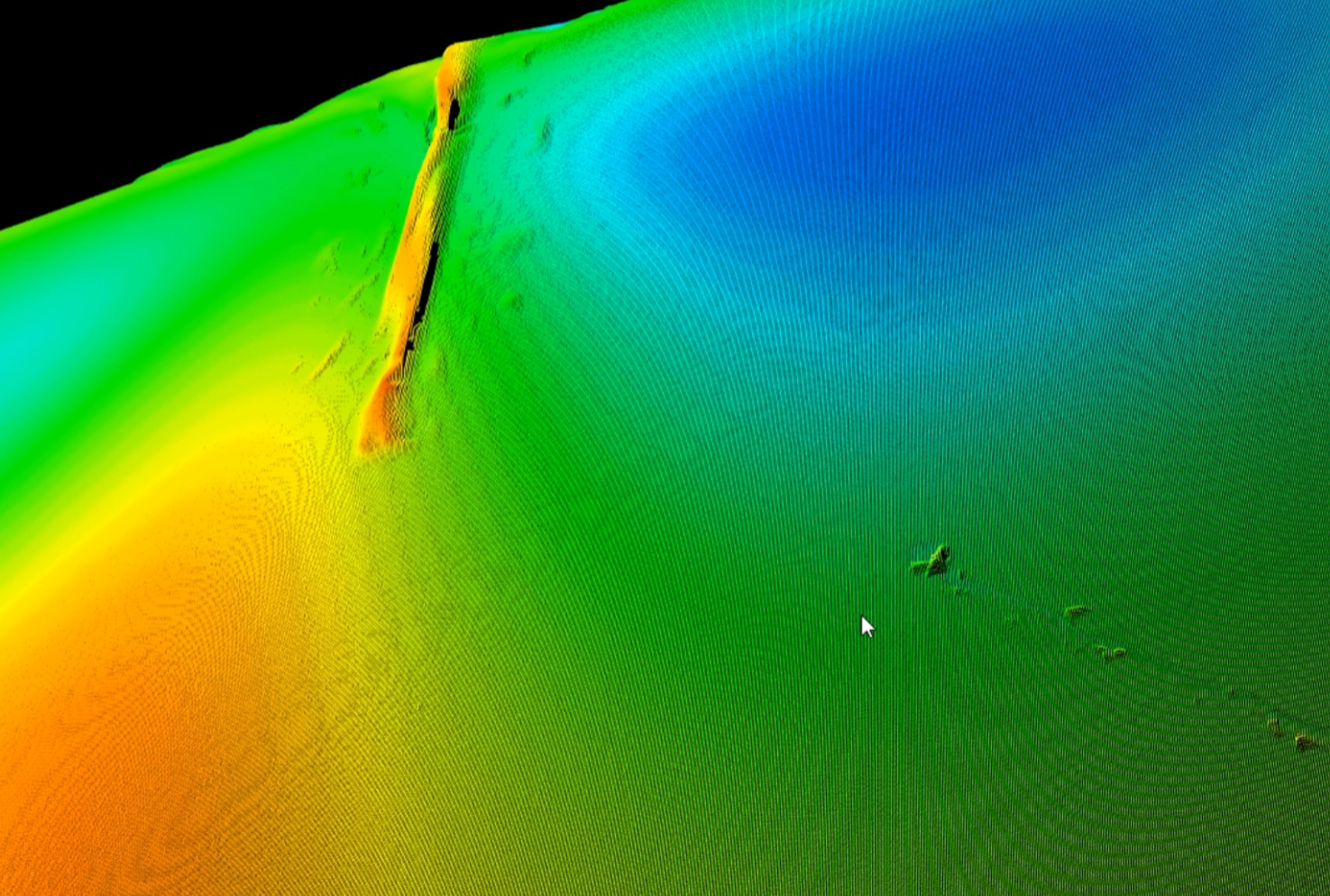
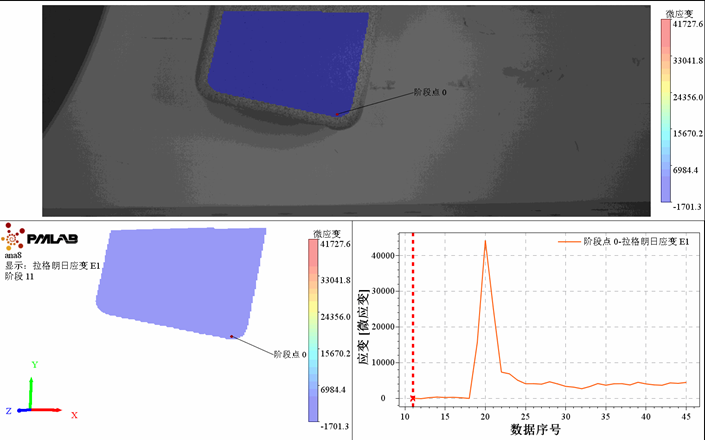
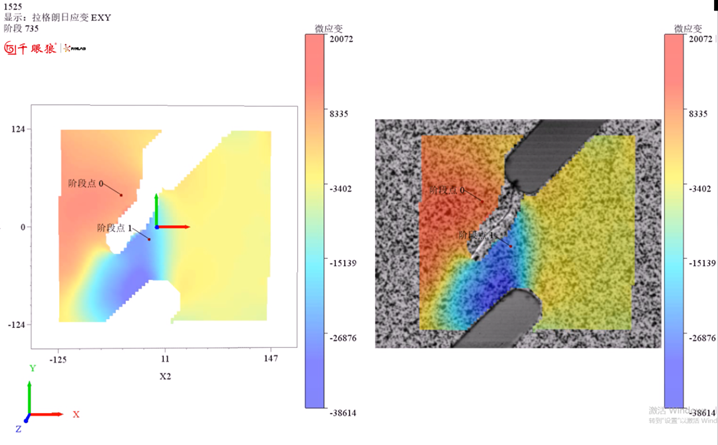
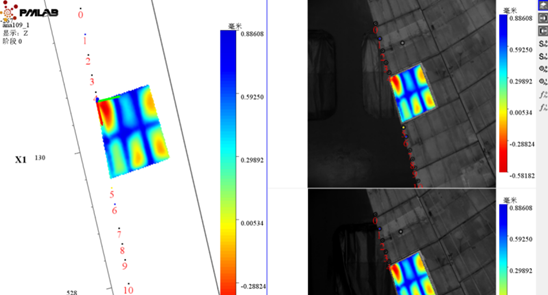
4、实验分析 实验基于重叠区域的点云拼接方法,可以得到所有阶段拼接后位于相机坐标系中的点云数据。通过全站仪测量的棱镜的三维坐标和它在相机坐标系中的三维坐标,得到两个坐标系之间的坐标变换关系。图4(a)和图9(b)分别显示了前四个轴承平台和所有轴承平台的拼接结果。

在实验过程中,通过3D-DIC方法重建承轨台的三维形状,计算时间不占用测量时间。由于在短距离范围内,基于点云数据拼接原理的测量误差在允许范围内,所以在测量设备移动过程中,没有必要使用全站仪测量反射棱镜的各个阶段。只需要测量特定位置的反射棱镜,效率大大提升。对于单块轨道板,只需要用全站仪进行一次测量。测量一块轨道板的时间为30秒,而测量一对承重平台平均需要3秒。
CRTS III型轨道板的长度为5.6米,一小时内可测量670米的距离。应该注意的是,为了确保拼接的准确性,全站仪每隔1000米就需要重新定位。全站仪的每次重新定位需要10分钟。用传统的方法,在一天内可以测量500米范围内的轨道板。相比之下,如果每天工作9小时,可以实现5000米/天的测量效率。
5、总结 科研团队与施工方进行合作,提出了一种基于3D-DIC的相机-全站仪-棱镜融合测量方法。该方法高精度、高效率的测量了承轨台的高度偏差,符合高速铁路建设的需求,并解决了基于重叠区的点云数据拼接方法中的坐标系不统一和传递误差问题。在实际实验中,张教授科研小组使用千眼狼PMLAB 3D-DIC方法测量承轨台(675毫米×275毫米×28毫米)的三维轮廓,精度高于0.1毫米,并通过使用全站仪定位反射棱镜的位置,对承轨台的三维轮廓进行拼接和统一。此外,3D-DIC方法与基于重叠区域的点云数据拼接原理一起被用于拼接相近的承轨台轮廓。受益于该测量技术,测量能力从500米/天提高到5000米/天,效率提高10倍,为高速铁路轨道板上的承轨台提供了一种全自动的、高效的、准确的高度偏差测量方法。(此文源自中国科学技术大学张青川教授科研团队)
电话:400-859-1866
邮箱:sales@agiledevice.com
地址:安徽省合肥市包河富煌新视觉大厦

微信公众号

官方抖音










































































































 400-859-1866
400-859-1866